Zakład Diagnostyki Nawierzchni
Zakład Diagnostyki Nawierzchni prowadzi kompleksowe badania stanu technicznego dróg i lotnisk. Ocenia nośność, równość, właściwości przeciwpoślizgowe i hałaśliwość nawierzchni oraz wykonuje rozpoznanie układu warstw konstrukcyjnych metodami bezinwazyjnymi. Zakres działalności Zakładu jest również wsparciem dla szerokiego zakresu specjalistów w opracowywaniu technologii przebudowy i wzmocnienia dróg.
Działalność Zakładu Diagnostyki Nawierzchni obejmuje problematykę związaną z oceną parametrów technicznych nawierzchni, takich jak nośność, równość podłużna, równość poprzeczna (koleiny), właściwości przeciwpoślizgowe, stan powierzchni. W Zakładzie wykonujemy ekspertyzy i opinie oparte na kompleksowych badaniach wykonywanych zarówno na poziomie sieci drogowej, jak i dla odcinków dróg przeznaczonych do remontu.
Zakład Diagnostyki zajmuje się następującymi dziedzinami drogownictwa: materiałami stosowanymi w nawierzchniach drogowych, nowoczesnymi metodami badań parametrów technicznych nawierzchni, mechanistycznymi metodami wymiarowania konstrukcji nawierzchni drogowych oraz bezpieczeństwem ruchu drogowego.
W swojej pracy wykorzystujemy nowoczesne metody badań i analiz oraz bogate doświadczenie profesjonalnego zespołu pracowników.
Zakres działalności:
- projektowanie nawierzchni (wymiarowanie konstrukcji),
- kompleksowa ocena stanu technicznego ulic,
- kompleksowa ocena stanu technicznego dróg,
- ocena stanu technicznego nawierzchni lotnisk,
- nadzór naukowy w zakresie pomiarów i przetwarzania wyników,
- ocena właściwości przeciwpoślizgowych nawierzchni,
- ocena równości podłużnej i poprzecznej (kolein) nawierzchni,
- ocena nośności nawierzchni,
- wizualna ocena stanu nawierzchni,
- identyfikacja warstw konstrukcyjnych nawierzchni drogowych,
- budowa i serwis zestawów pomiarowych SRT-3.
Ważniejsze prace Zakładu
- ocena stanu dróg krajowych, wojewódzkich i powiatowych na terenie miasta stołecznego Warszawy w latach 1998-2001, 2008-2009, 2012, 2018;
- diagnoza stanu nawierzchni ulic dla miasta Łodzi w latach 1999-2001;
- diagnoza stanu nawierzchni ulic, m.in. dla miast: Krakowa, Bydgoszczy, Łodzi, Torunia, Koszalina;
- ocena stanu dróg wojewódzkich dla Zarządu Dróg Wojewódzkich w Katowicach;
- ocena stanu dróg wojewódzkich dla Zarządu Dróg Wojewódzkich w Olsztynie;
- ocena stanu technicznego nawierzchni odcinków autostrad płatnych A1, A2 i A4;
- opracowanie aneksu nr 4 do wytycznych Systemu Oceny Stanu Nawierzchni pt. „Szorstkość – zasady pomiaru i oceny stanu”;
- nadzór merytoryczny nad pomiarami współczynnika tarcia urządzeniami SRT-3;
- opracowanie metody identyfikacji modułów warstw nawierzchni przy użyciu urządzenia FWD z wykorzystaniem testów quasi statycznych;
- ocena skuteczności napraw spękań na wybranych odcinkach badawczych na podstawie pomiarów w wysokiej i niskiej temperaturze nawierzchni;
- analiza szkód wyrządzanych przez pojazdy nienormatywne oraz opracowanie tabeli opłat za przejazdy tego typu pojazdami;
- analiza wpływu niekonwencjonalnego oznakowania „czarnych punktów” na bezpieczeństwo ruchu drogowego;
- opracowanie Banku Danych o pracach badawczych dotyczących bezpieczeństwa ruchu drogowego;
- opracowanie metody oceny stanu pęknięcia poprzecznego nawierzchni;
- liczne ekspertyzy dotyczące oceny stanu technicznego i opracowania technologii naprawy nawierzchni;
- opracowanie metody przeliczania modułów warstw asfaltowych do temperatury równoważnej;
- analiza polskich przepisów dotyczących właściwości przeciwpoślizgowych powierzchni drogowych w świetle wymagań obowiązujących w krajach europejskich;
- opracowanie współczynników sezonowości dla nawierzchni dróg w polskich warunkach klimatycznych;
- opracowanie zasad dokonywania przeglądu stanu poboczy, rowów i odwodnienia nawierzchni;
- wpływ dokładności identyfikacji konstrukcji nawierzchni na wymiarowanie wzmocnienia dróg;
- przeprowadzenie wdrożeniowych pomiarów konstrukcji nawierzchni drogowych na poziomie sieci;
- ocena geotechniczna podłoża gruntowego techniką radarową z szczególnym uwzględnieniem stanu hydrologicznego podłoża gruntowego;
- analiza propagacji spękań nawierzchni z wykorzystaniem techniki radarowej;
- analiza możliwości wykorzystania techniki radarowej w ocenie stanu połączeń międzywarstwowych;
- analiza zmienności właściwości przeciwpoślizgowych warstwy ścieralnej nawierzchni w początkowym okresie jej eksploatacji;
- opracowanie funkcji przeliczeniowych wartości współczynnika tarcia uzyskiwanych urządzeniami SRT-3 i T2GO;
- ocena wpływu zagęszczenia warstwy asfaltowej na uzyskiwane wartości stałej dielektrycznej;
- opracowanie kompleksowego Systemu Diagnostyki Stanu Technicznego Nawierzchni dróg krajowych (DSN);
- opracowanie wizualnej metody oceny stanu nawierzchni BIKB-IBDM;
- udział w pracach grup roboczych opracowujących „Katalog Typowych Konstrukcji Nawierzchni Podatnych i Półsztywnych” oraz „Katalog Wzmocnień i Remontów Nawierzchni Podatnych i Półsztywnych”;
- opinia w/s propozycji wymagań dotyczących właściwości przeciwpoślizgowych nawierzchni drogowych;
- badania poznawcze wpływu sezonowości i warunków zewnętrznych na zmienność współczynnika tarcia nawierzchni drogowych;
- badania ugięć ugięciomierzem TSD na drogach krajowych;
- badania ugięć ugięciomierzem TSD na drogach w innych krajach: Niemcy, Norwegia, Szwecja, Dania (badania porównawcze), Finlandia, Słowacja, Czechy, Grecja;
- udział w projekcie RID – I /76 „Ochrona przed hałasem drogowym”;
- udział w programie GOSPOSTRATEG, w projekcie „Sieć dróg 11,5 t”.
Możliwości pomiarowe
Zestaw pomiarowy SRT-3
Zestaw pomiarowy SRT-3 (fot. 1) reprezentuje trzecią generację urządzeń do pomiaru współczynnika tarcia. Pierwsza wersja, modyfikowana w kolejnych latach, została opracowana w latach 60-tych w IBDiM, we współpracy z Politechniką Warszawską. Przyczepa dynamometryczna wchodząca w skład zestawu pomiarowego posiada oryginalny schemat kinematyczny i szereg korzystnych własności, które wyróżniają ją spośród podobnych urządzeń pomiarowych.
W roku 1992 zestaw SRT-3 uczestniczył w Międzynarodowym Eksperymencie zorganizowanym przez PIARC, natomiast w 2002 i 2003 roku w Międzynarodowym Eksperymencie HERMES zorganizowanym przez FEHRL. Oba cykle badań służyły ocenie korelacji wyników pomiarów wykonywanych różnymi, stosowanymi w świecie urządzeniami do dynamicznego pomiaru współczynnika tarcia nawierzchni drogowych.

fot. 1. Zestaw pomiarowy SRT-3 (własność IBDiM)
Dzięki oryginalnym rozwiązaniom SRT-3 posiada szereg zastosowań i możliwości:
- pomiar współczynnika tarcia przy pełnej blokadzie koła pomiarowego dwoma metodami: przez pomiar momentu hamującego i przez bezpośredni pomiar siły tarcia,
- pomiar siły oporów toczenia,
- pomiar współczynnika tarcia na łukach poziomych,
- pomiar siły w zawieszeniu przyczepy dynamometrycznej, pozwalający na korektę wartości współczynnika tarcia ze względu na wielkość docisku koła testowego do nawierzchni,
- możliwość określenia współczynnika przyczepności w funkcji poślizgu względnego.
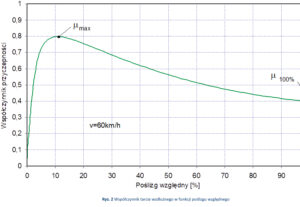
fot. 2. Współczynnik tarcia wzdłużnego w funkcji poślizgu względnego
Zasada pomiaru
Pomiar wszystkich badanych cech wymienionych powyżej, charakteryzujących współczynnik tarcia nawierzchni drogowej, opiera się na porównywaniu wypadkowej elementarnych sił tarcia (w ujęciu chwilowym lub uśrednionym) rozwijanych między hamowanym kołem pomiarowym urządzenia badawczego a nawierzchnią drogi z wypadkową elementarnych reakcji normalnych pod kołem pomiarowym, o charakterze obciążenia lub nacisku. W każdym przypadku koło pomiarowe przyczepy dynamometrycznej doprowadzane jest w ułamku sekundy do pełnej blokady, z reguły na nawierzchni mokrej.
W zależności od tego, która z wymienionych powyżej cech jest przedmiotem badania, w obliczeniach wykorzystywana jest inna część pełnego procesu hamowania, w którym koło pomiarowe wytraca prędkość kątową od wartości μk = μ0 (swobodne toczenie) do wartości μk = μ0 (pełna blokada).
Dane techniczne zestawu pomiarowego SRT-3:
- obciążenie nominalne koła pomiarowego – 2943 N (300 kG),
- standardowa prędkość pomiarowa – 60 km/h,
- zakres prędkości pomiarowych – 30-120 km/h,
- opona pomiarowa: 165 R15/PIARC, gładka z obwodowymi rowkami,
- masa całkowita – ok. 360 kg,
- pneumatyczny system wypływu wody,
- regulowany czas hamowania,
- regulowany czas uśredniania mierzonych wartości.
Badanie współczynnika tarcia nawierzchni urządzeniem SRT-3 stosuje się do:
- testowania różnych technologii wykonania nawierzchni drogowych,
- pomiarów inwentaryzacyjnych dla potrzeb systemu DSN (Diagnostyka Stanu Nawierzchni) oraz systemu WDSN (Wytyczne diagnostyki stanu technicznego nawierzchni dla dróg wojewódzkich),
- badań odbiorczych nowych nawierzchni,
- oceny stanu technicznego nawierzchni dróg wszystkich kategorii,
- ekspertyz sądowych w miejscach wypadków drogowych.
Badania zestawem SRT-3 są objęte zakresem akredytacji Laboratorium Badawczego Nr AB 426, wydanym przez Polskie Centrum Akredytacji.
Ugięciomierze dynamiczne FWD i HWD
Badania ugięciomierzami FWD i HWD objęte są zakresem akredytacji Laboratorium Badawczego Nr AB 426, wydanym przez Polskie Centrum Akredytacji.
Ugięciomierz dynamiczny FWD
Ugięciomierz dynamiczny FWD (ang. Falling Weight Deflectometer, fot. 1) jest obecnie najczęściej stosowanym urządzeniem do oceny nośności nawierzchni drogowych. Pozwala na pomiar czaszy ugięć nawierzchni pod zadanym obciążeniem (fot. 2). Po ustawieniu urządzenia w danym punkcie pomiarowym na nawierzchnię opuszczana jest automatycznie płyta naciskowa (fot. 3) wraz z czujnikiem centralnym oraz czujniki znajdujące się na belce pomiarowej w ustalonych odległościach. Z określonej wysokości wykonywany jest zrzut obciążnika o ustalonej wcześniej masie (maksymalny nacisk 120 kN). W wyniku działania obciążenia konstrukcja nawierzchni oraz podłoże ulegają odkształceniu sprężystemu na pewnym obszarze, którego wielkość jest zależna od wielkości zadanego obciążenia testowego oraz od sztywności badanej konstrukcji. Wielkości ugięć nawierzchni mierzone są zwykle za pomocą 7-9 czujników ustawionych w ściśle określonych odległościach od osi działania siły obciążającej (np. 200, 300, 450, 600, 900, 1200, 1500 i 1800 mm). Przebiegi procesów obciążenia i odkształcenia się konstrukcji są rejestrowane jednocześnie. Wyniki pomiaru czaszy ugięć wykorzystuje się do wyznaczenia, zazwyczaj metodą obliczeń odwrotnych (ang: back-calculation analysis) modułów sprężystości (lub sztywności) warstw konstrukcyjnych nawierzchni. Moduł sprężystości jest podstawowym parametrem w mechanistycznych analizach trwałości (nośności) konstrukcji nawierzchni drogowych.

fot. 1. Ugięciomierz dynamiczny FWD (własność IBDiM)
Sterowanie tym urządzeniem jest automatyczne. Kierowca, będący jednocześnie operatorem, przy pomocy dodatkowych urządzeń (dystansomierz, kamera) dokonuje wyboru miejsca badania oraz kontroluje przebieg procesu pomiarowego. Aparat FWD jest sterowany przez procesor pokładowy, a poprawność wyników uzyskiwanych w trakcie pomiarów kontrolowana jest na bieżąco przez komputer pokładowy.
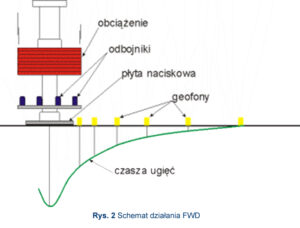
fot. 2. Schemat działania FWD

fot. 3. Widok płyty naciskowej oraz dwóch geofonów
Ugięciomierz dynamiczny HWD
Ugięciomierz dynamiczny HWD (ang. Heavy Weight Deflectometer, fot. 4) działa na tej samej zasadzie, co FWD, ma jednak możliwość wywierania większego nacisku na badaną nawierzchnię (do 320 kN). Dlatego jest stosowany głównie na nawierzchniach lotniskowych, które mają znacznie grubszą konstrukcję od nawierzchni drogowych.

fot. 4. Ugięciomierz HWD (własność IBDiM)
Wyniki pomiarów ugięciomierzami FWD i HWD mogą być wykorzystane nie tylko na poziomie projektu, ale również na poziomie sieci drogowej i ulicznej. Na poziomie sieci uzyskane wyniki można wykorzystać między innymi do budowy banku danych o nośności dróg, co jest pomocne w prawidłowym ustalaniu budżetu, podziału środków, typowaniu odcinków do remontu lub przebudowy oraz hierarchizacji ważności działań na sieci drogowej.
Głównym zadaniem ugięciomierzy jest ocena nośności nawierzchni, jednak wyniki pomiarów mogą być wykorzystane również do innych celów, np.:
- określenie modułu sztywności poszczególnych warstw konstrukcji,
- wymiarowania wzmocnień metodą ugięć,
- oceny warunków podparcia warstw sztywnych (betonowych),
- oceny współpracy płyt w pęknięciu „odbitym”.
Georadary GSSI i 3DR
Mobilne systemy GPR pozwalają na szczegółową ocenę badanej konstrukcji zarówno pod względem ilościowym, jak i jakościowym. Dzięki zastosowaniu georadaru można, oprócz pomiaru grubości warstw, dokonać też bardziej zaawansowanych zadań, takich jak identyfikacja zawilgocenia konstrukcji nawierzchni, charakteryzacja typu i stanu połączeń międzywarstwowych, identyfikacja i badanie spękań, ocena podatności elektrycznej warstw, identyfikacja poziomu zwierciadła wody gruntowej i poziomu przemarzania, lokalizacja pustek w nawierzchniach betonowych, lokalizacja przewodów i przepustów, czy ocena stopnia skorodowania zbrojenia.
Technika pomiarowa GPR wykorzystuje zasady propagacji fal elektromagnetycznych. Gdy fala elektromagnetyczna przenika granicę dwóch warstw o różnych właściwościach dielektrycznych, część z niej odbija się, reszta zaś przechodzi do następnej warstwy, ulega także refrakcji. Zjawisko odbicia jest podstawą najbardziej rozpowszechnionej metody pomiarowej GPR, zwanej refleksyjną. Metody refrakcyjne, nastawione na pomiar czasu przejścia fali przez ośrodek i szacowanie prędkości fali tą drogą, są stosowane zdecydowanie rzadziej, gdyż wiążą się z potrzebą umieszczania anten wewnątrz ośrodka lub stosowania zestawów anten z rozstawem pomiędzy nimi.
Georadar GSSI
Mobilny System Radarowy ROADSCAN 2 jest urządzeniem przeznaczonym do badań grubości i rodzaju warstw konstrukcyjnych nawierzchni drogowych i podłoża gruntowego oraz do oceny stanu zbrojenia i betonu w płytach pomostów obiektów mostowych. Modułowa budowa systemu, jak również „otwarte” pod względem konfiguracji oprogramowanie sterujące, zwiększają zakres pomiarowy urządzenia. Zastosowane w tym urządzeniu rozwiązania technologiczne pozwalają również wykonywać bardziej zaawansowane pomiary parametrów, takich jak wilgotność konstrukcji nawierzchni, poziom zwierciadła wody gruntowej, głębokość przemarzania, lokalizacja pustek w nawierzchniach betonowych, lokalizacja przewodów, czy stan skorodowania zbrojenia.
Urządzenie składa się z następujących elementów:
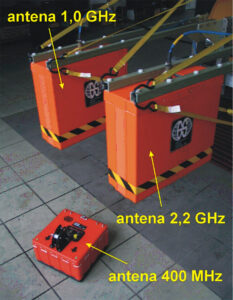
fot. 1. Georadar GSSI
- zespołu zasilania, sterowania, zapisu i przetwarzania danych:
- jednostka centralna SIR-20 wraz z komputerem Panasonic;
- anten GSSI o częstotliwości:
- 2,2 GHz (głębokość penetracji ok. 300 mm, minimalna grubość zmierzonej warstwy 20-30 mm),
- 1,0 GHz (głębokość penetracji ok. 700 mm, minimalna grubość zmierzonej warstwy 70-80 mm),
- 400 GHz (głębokość penetracji ok. 3000 mm, minimalna grubość zmierzonej warstwy 200 mm),
- 260 MHz (głębokość penetracji ok. 5000 mm, minimalna grubość zmierzonej warstwy 600 mm),
- czujnika pomiaru odległości.

fot. 2. Samochód pomiarowy z zamontowanym czujnikiem pomiaru odległości
Wymienione powyżej elementy zainstalowane są na specjalnie przygotowanym samochodzie pomiarowym, dzięki czemu zarówno pomiar wszystkimi antenami, jak i wybranymi zestawami anten, można prowadzić w ruchu.
Dodatkowym elementem wyposażenia jest wózek pomiarowy, który jest stosowany do pomiarów geotechnicznych, szczególnie w miejscach trudno dostępnych dla samochodu pomiarowego.

fot. 3. Wózek pomiarowy stosowany do pomiarów geotechnicznych
Istotną częścią systemu pomiarowego jest wysokiej klasy oprogramowanie wspomagające proces interpretacji danych. Do wizualizacji i przetwarzania danych stosowane są między innymi programy RADAN, Road Doctor 3D oraz GPRSLICE. W zależności od celu prowadzonych pomiarów operator może wybrać to oprogramowanie, które podniesie efektywność procesu interpretacyjnego. Poniżej przykład interfejsu użytkownika w programie Road Doctor 3D.
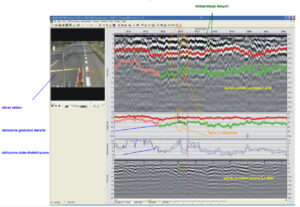
fot. 4. Przykład interfejsu użytkownika w programie Road Doctor 3D
Zalety georadaru wykorzystywane są przez wiele agencji zajmujących się zarządzaniem sieciami drogowymi. Do najczęstszych aplikacji techniki radarowej należą pomiar grubości warstw, ocena pustek, lokalizacja obiektów w gruncie oraz bardziej skomplikowane, stosowane jako badania uzupełniające, takie jak ocena rozwarstwień, pęknięć, ocena ubytków lepiszcza lub wymycia w pobliżu przyczółków mostów i wiaduktów. Podstawowe możliwości pomiarowe systemów radarowych przedstawiono w tabeli.
Tabela 1. Wybrane cechy konstrukcji, które mogą być zmierzone z wystarczającą dokładnością przez zastosowanie różnych typów radarów
| wybrane cechy |
prędkość pomiaru |
charakterystyka radaru |
|||
| niska
<20 km/h |
wysoka
>50 km/h |
400-500 MHz gp* | 1 GHz h* | 2,0-2,5 GHz h* | |
| zmiana konstrukcji | tak | tak | tak | jedynie do głębokości ok. 600 mm | jedynie do głębokości ok. 400 mm |
| minimalna grubość zmierzonej warstwy | tak | tak | 100 mm (200 mm dla warstwy wierzchniej) |
50 mm dla wszystkich warstw | 25 mm dla wszystkich warstw |
| pustki pod niezbrojonymi płytami betonowymi | tak | tak ** | tylko jeżeli głębokość pustki jest znaczna | tak bez możliwości oceny ilościowej |
nie stwierdzono |
| wilgotność podbudowy pomocniczej | tak | tak | tak | nie stwierdzono | zbyt mała głębokość penetracji |
*) antena typu gp (ground coupled) umieszczana jest bezpośrednio na powierzchni badanej konstrukcji, natomiast antena typu h (horn) ok. 45-50 cm nad badaną konstrukcją,
**) jeżeli wielkość pustki jest większa niż częstotliwość pomiaru
Georadar 3DR
System firmy 3D Radar AS jest przystosowany do georadarowych pomiarów drogowych i składa się z zespołu antenowego typu step frequency (z ang. zmiennej częstotliwości) wyposażonego w 15 par anten nadawczo-odbiorczych, jednostki centralnej zarządzającej pracą anten i zbieraniem danych, dystansomierza, anteny odbierającej sygnał GPS i systemu zasilania. Georadar 3D należy do nowej generacji rozwiązań sprzętowych. W odróżnieniu od kategorii używanych powszechnie georadarów impulsowych jest on oparty na technice przestrajania krokowego. Umożliwia jednoczesne zbieranie danych wzdłuż kilkunastu profili przy jednym przejeździe.


fot. 1. Georadar 3DR
Niezwykle cenną własnością tego modelu jest możliwość synchronizacji przestrzennej wyników zbieranych w wielu przejazdach z decymetrową dokładnością za pomocą sygnału GPS. Zsynchronizowane wyniki pomiarów dają możliwość uzyskania przestrzennego (pseudo 3D) obrazu budowy ośrodka i mogą być dalej prezentowane za pomocą cięć pionowych i poziomych jak na rysunku poniżej.
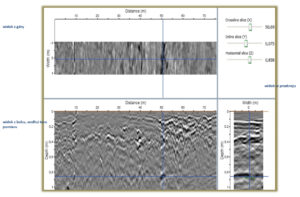
fot. 2. Przestrzenny obraz budowy ośrodka uzyskany dzięki odczytom z georadaru 3DR
Profilograf laserowy SPDE
SPDE (ang. System for Pavement Distress Evaluation) to urządzenie zawierające w sobie kilka podsystemów pomiarowych oprogramowanych wspólnym softwarem. Integracja różnych urządzeń w ramach jednego systemu pomiarowego oraz możliwość prowadzenia pomiaru w czasie rzeczywistym w normalnych warunkach ruchowych pozwala uzyskać pełną zgodność danych o parametrach nawierzchni i znacznie zwiększa efektywność prowadzonej oceny cech powierzchniowych nawierzchni.

fot. 1. System SPDE
System pomiarowy może być wykorzystany do badania takich cech nawierzchni, jak profil podłużny i poprzeczny, teoretyczna głębokość filmu wodnego w koleinie, spadki podłużne i poprzeczne drogi, promienie łuków poziomych drogi, tekstura nawierzchni. Do tego celu służy belka zamontowana z przodu pojazdu z zainstalowanymi czujnikami laserowymi o różnej charakterystyce. Czujniki rozmieszczone są co 12,5 cm, a dzięki specjalnym czujnikom kątowym efektywna szerokość pomiarowa została zwiększona do 3,5 m. Całość oprzyrządowana jest dodatkowymi elementami, takimi jak żyroskop, akcelerometr, 4 czujniki do pomiaru równości podłużnej (umocowane w osi prawych kół pod samochodem) oraz dodatkowy czujnik laserowy o nieco innej charakterystyce przeznaczony do pomiaru tekstury.
SPDE umożliwia również rejestrację cyfrowego obrazu powierzchni nawierzchni i występujących na niej uszkodzeń na szerokości do 4 m z rozdzielczością 1 mm × 1 mm. Dzięki użyciu technologii oświetlenia LED pozostaje również niewrażliwy na zmieniające się warunki oświetleniowe (fot. 2). Błyski światła LED mają wysoką intensywność w widmie światła nagrywanego, które kilkukrotnie przewyższa intensywność światła dziennego. Obraz powierzchni nawierzchni rejestrowany jest przez dwie kamery z tyłu samochodu. Dodatkowo z przodu pojazdu umieszczona jest kamera do rejestracji obrazu pasa drogowego, dzięki której możliwy jest pomiar i identyfikacja elementów pasa drogowego.

fot. 2. Rejestracja zdjęć powierzchni jezdni systemem SPDE
Dzięki zastosowaniu zaawansowanych technologii pomiarowych uzyskiwane w trakcie pomiarów dane są bardzo szczegółowe i pozwalają na precyzyjną lokalizację zidentyfikowanych odcinków o gorszych parametrach powierzchniowych. Duży zasób danych daje możliwość wdrażania nowych, precyzyjniejszych metod interpretacji i oceny stanu nawierzchni drogowych.
Badania równości Profilografem SPDE są objęte zakresem akredytacji Laboratorium Badawczego Nr AB 426, wydanym przez Polskie Centrum Akredytacji.
System pomiarowy do identyfikacji uszkodzeń MFV
Wielofunkcyjny pojazd MFV zbudowany jest w oparciu o trzy podsystemy pomiarowe: HDI, ROW i RSP-III zarządzane wspólną jednostką sterującą. Pojazd umożliwia jednoczesne zbieranie danych o równości podłużnej drogi, zdjęć powierzchni nawierzchni oraz otoczenia badanej drogi.

fot. 1. Wielofunkcyjny pojazd MFV – widok z tyłu

fot. 2. Wielofunkcyjny pojazd MFV – widok z przodu

fot. 3. Wielofunkcyjny pojazd MFV – stanowisko operatora
System obrazowania w wysokiej rozdzielczości HDI (High Definition Imaging) służy do rejestrowania obrazów powierzchni nawierzchni w celu identyfikacji jej uszkodzeń. Urządzenie umożliwia zbieranie danych w postaci zdjęć nawierzchni o rozdzielczości 1 × 1 mm na szerokości niemal 4 m i z prędkością pomiarową do 100 km/h. Unikatowe rozwiązanie konstrukcyjne sprawia, że spękania konstrukcji widoczne są w każdych warunkach oświetleniowych zarówno w kierunku poprzecznym, jak i podłużnym. Zasada działania systemu opiera się na zastosowaniu dwóch par urządzeń: liniowego lasera oświetlającego (fot. kolor czerwony) oraz kamery szczelinowej (fot. kolor niebieski). Podczas pomiaru urządzenie skanuje nawierzchnię co 1 mm, a wynikiem końcowym jest para zdjęć lewe i prawe o zadanej długości, np. 2 m.

fot. 4. Widok ogólny urządzenia HDI
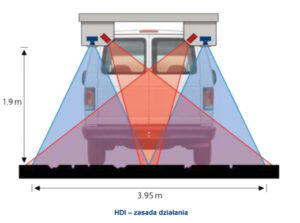
fot. 5. Zasada działania urządzenia HDI
System Right of Way (ROW) jest uzupełnieniem systemu HDI i służy do rejestrowania zdjęć nawierzchni i pasa drogowego. Głównym elementem systemu są trzy kamery umieszczone przy przedniej szybie pojazdu oraz jedna kamera umieszczona z tyłu pojazdu, z których obraz przekazywany jest bezpośrednio do centralnej jednostki sterującej, a tam kojarzony z odpowiednimi plikami pomiarowymi. Dzięki zarejestrowanym zdjęciom możliwe jest łatwe lokalizowanie uszkodzeń nawierzchni i powiązanie ich, np. z istniejąca infrastrukturą drogową.
System pomiaru równości podłużnej RSP (Road Surface Profiler) składa się z belki pomiarowej, jednostki sterującej oraz komputera PC, wspólnego dla wszystkich systemów pomiarowych. W belce zamontowane są: czujnik laserowy i akcelerometr. Zasada badania profilu podłużnego polega na pomiarze odległości pomiędzy samochodem a nawierzchnią przy użyciu czujnika laserowego z jednoczesną korekcją wychyleń pojazdu rejestrowaną przez akcelerometr. Otrzymany z pomiarów profil podłużny nawierzchni jest elementarną cechą nawierzchni, która służy do wyznaczania takich parametrów stanu, jak np. międzynarodowy wskaźnik równości IRI (International Roughness Index).

fot. 6. Belka pomiarowa RSP
Ugięciomierz laserowy TSD
Ugięciomierz laserowy TSD (Traffic Speed Deflectometer) to zaawansowane technologicznie urządzenie do zbierania informacji o stanie nośności nawierzchni. Stworzone zostało z myślą o wykonywaniu pomiarów ugięć na sieciach drogowych. Szczególną zaletą tego urządzenia jest efektywność działania, pozwalająca precyzyjnie i szybko zidentyfikować miejsca o obniżonej trwałości konstrukcji drogowej – w zarządzaniu siecią drogową rzecz niezbędna i podstawowa. Jakość uzyskiwanych danych i nowe rozwiązania techniczne sprawiają, że użytkowany przez Instytut ugięciomierz TSD jest unikatowym urządzeniem nie tylko w skali kraju, ale także w Europie i na świecie.


fot. 1. Ogólny widok pojazdu TSD (fot. lewa), belka pomiarowa z czujnikami laserowymi (fot. prawa)
Sercem systemu pomiarowego jest belka z czujnikami laserowymi zamontowana w naczepie ciężarówki w taki sposób, aby główny czujnik mierzył ugięcie w osi obciążenia, tj. między kołami koła bliźniaczego. Następne czujniki umieszczone są w linii śladu koła w ustalonych od siebie odległościach – przed i za kołem.
Pomiar polega na określeniu prędkości pionowego przemieszczenia oraz kąta ugięcia powierzchni wywołanego przez poruszającą się ciężarówkę. Różnica przemieszczeń między punktem obciążonym i nieobciążonym jest wyrażeniem aktualnego ruchu nawierzchni wywołanego przez pojazd o znanym obciążeniu. Na podstawie tych danych wyliczane jest ugięcie nawierzchni w każdym punkcie pomiarowym.
Proces pomiarowy jest automatyczny i może go przeprowadzić jedna osoba. Pomiary wykonywane są zazwyczaj przy prędkości 60-70 km/h. Maksymalna prędkość pomiarowa wynosi 95 km/h, natomiast minimalna to 35 km/h. Typowa wielkość obciążenia to 10 ton na oś, z możliwością zmiany na 7 ton i 13 ton. Ugięciomierz TSD gwarantuje wysoką korelację i powtarzalność wyników. Przedstawiony poniżej wykres obrazuje dokładność, z jaką system pomiarowy odtwarza rejestrowane na tym samym odcinku ugięcia w kolejnych przejazdach. Ta podstawowa dla zaawansowanych systemów pomiarowych właściwość jest niezbędna w prawidłowej i rzetelnej ocenie sieci drogowej pod kątem bieżącej nośności konstrukcji nawierzchni.
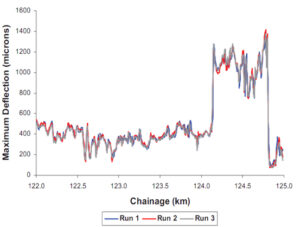
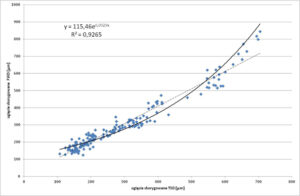
fot. 2. Wartości ugięć zarejestrowane w trzech kolejnych przejazdach TSD (wykres lewy), zależność TSD/FWD (wykres prawy)
Dodatkowym wyposażeniem ugięciomierza są: georadar GSSI, który pozwala między innymi na nieinwazyjny pomiar grubości warstw nawierzchni oraz pomiar jednorodności zagęszczenia warstwy ścieralnej.
Ugięciomierz TSD został wzbogacony również o system pomiarowy LCMS, który umożliwia identyfikację i interpretację uszkodzeń powierzchniowych, równości podłużnej i głębokości kolein, makrotekstury oraz geometrii drogi. Dzięki szybkoklatkowym kamerom i liniowym projektorom laserowym, rejestrującym obraz nawierzchni wraz z jej trójwymiarowym profilem, uzyskujemy trójwymiarowy obraz powierzchni o ultra wysokiej rozdzielczości.
Badanie stanu nawierzchni może być wykonane w dzień i w nocy z prędkością 0-100 km/h zachowując w każdej prędkości rozdzielczość 1 mm! Ta szczegółowość danych uzyskiwanych w trakcie pomiaru oferuje możliwość obserwacji własności powierzchni w skali dotychczas niespotykanej.

fot. 3. Czujniki LCMS (fot. lewe), antena GPR w obudowie ochronnej (fot. prawe)
Ponadto system wyposażony jest w czujniki podczerwieni do pomiaru temperatury powierzchni nawierzchni, kamerę do rejestracji obrazu pasa drogowego, czujnik laserowy do pomiaru równości podłużnej nawierzchni, WiFi i GPS.
System pomiarowy Tiresonic Mk-4 do pomiaru hałaśliwości nawierzchni metodą CPX
Pomiary hałaśliwości nawierzchni metodą CPX (Close Proximity Method, PN-EN ISO 11819-2:2017-06 – Akustyka – Pomiary wpływu nawierzchni dróg na hałas drogowy – Część 2: Metoda pomiaru w polu bliskim) wykonane są urządzeniem Tiresonic Mk-4 (fot. 1).

fot. 1. Widok urządzenia Tiresonic Mk-4
Metoda CPX służy głównie do oceny różnych technologii wykonania nawierzchni dróg pod kątem ich wpływu na hałas komunikacyjny w warunkach dominującego hałasu pochodzącego z kontaktu opony z nawierzchnią. Interpretacja wyników dotyczy swobodnego ruchu pojazdu poruszającego się po zasadniczo równej drodze ze stałą prędkością powyżej 40 km/h, w którym to przypadku zakłada się przewagę hałasu generowanego na styku opony i nawierzchni. Metoda CPX ma zastosowanie m.in. w następujących przypadkach:
- w ocenie hałaśliwości nawierzchni, której głównym celem jest sprawdzenie zgodności ze specyfikacją wykonania nawierzchni,
- do sprawdzenia trwałości akustycznej, np. pod wpływem zużycia, uszkodzenia powierzchni, „zatykania” wolnych przestrzeni oraz w ocenie efektywności czyszczenia nawierzchni porowatych,
- do sprawdzenia jednorodności odcinka drogi,
- rozwoju cichszych nawierzchni drogowych i badanie interakcji opony z drogą.
W metodzie CPX pomiarowi podlegają ważone filtrem A uśrednione poziomy dźwięku rejestrowane na odcinku testowym przy określonej prędkości, przez co najmniej dwa mikrofony umieszczone blisko opon. W badaniach wykorzystuje się specjalny pojazd testowy, który jest z napędem własnym lub jest holowany za innym pojazdem. Opony referencyjne są montowane w pojeździe badawczym pojedynczo lub dwie jednocześnie.
Testy są wykonywane w celu określenia poziomu CPX (LCPX) rejestrowanego przez mikrofony przy jednej lub większej liczbie prędkości referencyjnych. Poziom ten określa się poprzez wykonanie badania z prędkością referencyjną lub normalizując odchylenia prędkości.
W przypadku każdej opony referencyjnej i każdego indywidualnego przejazdu testowego z tą oponą rejestruje się średnie poziomy LCPX na krótkich segmentach testowych (odcinki po 10 m każdy), wraz z odpowiednimi prędkościami pojazdu. Poziom LCPX każdego segmentu normalizuje się do prędkości odniesienia za pomocą prostej procedury korekcji. Uśrednianie przeprowadza się następnie zgodnie z celem pomiaru, tj. mierząc konkretny segment lub określoną liczbę kolejnych segmentów (sekcję).
Poziom CPX (LCPX: t vref), to wynikowy średni poziom dla dwóch obowiązkowych mikrofonów przy prędkości odniesienia – vref dla opony referencyjnej t, gdzie t to P lub H (w zależności od zastosowanej opony). Jeżeli wyznaczono poziomy CPX dla obu opon referencyjnych, indeks LCPX: I jest średnią LCPX: P i LCPX: H z jednakową wagą nadaną obu poziomom.
Konstrukcja pojazdu badawczego Tiresonic Mk-4 zapewnia możliwość wykonywania pomiarów hałasu w warunkach zbliżonych do warunków wzorcowych, to znaczy bez udziału innych źródeł hałasu niż opona tocząca się po nawierzchni jezdni oraz bez odbić fali dźwiękowej od powierzchni innych niż nawierzchnia jezdni. Mikrofony rejestrujące dźwięk odizolowane są skutecznie od czynników zewnętrznych osłoną (komorą) bezechową. Podczas badań dwa mikrofony umieszcza się w pozycjach zdefiniowanych na fot. 2.
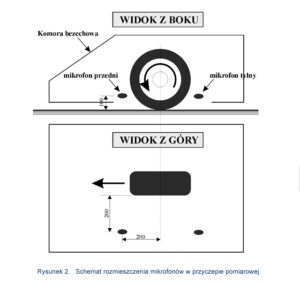
fot. 2. Schemat rozmieszczenia mikrofonów w przyczepie pomiarowej
Koło testowe, mikrofony oraz termometry umieszczone są na przyczepie pomiarowej. Testy prowadzone są z nominalnymi prędkościami określonymi w normie ISO 11819-2. Preferowane są następujące prędkości nominalne: 50, 80 i 110 km/h. Podczas każdego przejazdu testowego należy mierzyć rzeczywistą prędkość pojazdu badawczego. Na podstawie tych pomiarów określa się prędkość średnią dla każdego segmentu testowego o długości 10 m, a następnie koryguje się wyniki pomiarów poziomów dźwięku w stosunku do prędkości nominalnej.
Standardowe badania CPX powinny być prowadzone z wykorzystaniem opon referencyjnych opisanych w normie ISO 11819-3. W zależności od celu badań stosuje się oponę P (do samochodów osobowych) lub H (do samochodów ciężarowych). Widok koła testowego zainstalowanego na przyczepie oraz mikrofonów przygotowanych do wykonania pomiarów akustycznych przedstawiono na fot. 3.

fot. 3. Widok koła testowego i mikrofonów w urządzeniu Tiresonic Mk-4
Nowoczesna diagnostyka dróg rowerowych
Mobilne urządzenie pomiarowe (MUP) ścieżek rowerowych to specjalistyczne narzędzie służące do precyzyjnego badania i monitorowania infrastruktury rowerowej. Jego zadaniem jest gromadzenie szczegółowych danych na temat jakości, długości oraz stanu nawierzchni ścieżek rowerowych i powiązanej z nimi infrastruktury.
Urządzenie jest przygotowane do wykonywania:
- pomiaru odległości i długości ścieżek – określa dokładną długość trasy rowerowej, co pozwala na tworzenie szczegółowych map oraz analizę pokrycia infrastruktury rowerowej w danym obszarze;
- pomiaru równości nawierzchni – za pomocą czujników laserowych urządzenie ocenia stan ścieżki, np. równość nawierzchni czy obecność uszkodzeń (etap testowania);
- oceny stanu nawierzchni – wbudowane systemy mogą analizować typ nawierzchni (np. asfalt, kostka, żwir) oraz oceniać jej jakość, identyfikując ubytki, pęknięcia lub deformacje (etap koncepcji oprogramowania);
- identyfikacji cech geometrycznych drogi, takich jak szerokość nawierzchni, odległość między wskazanymi elementami drogi, identyfikacja oznakowania pionowego i poziomego, a także elementów towarzyszących, które istotnie wpływają na komfort podróżowania, między innymi totemy informujące rowerzystów o tempie jazdy, miejscach parkingowych i serwisowych (etap koncepcji oprogramowania).
System lokalizacji satelitarnej zainstalowany na MUP umożliwia precyzyjne określenie położenia na mapie, co ułatwia tworzenie dokładnych raportów i wizualizacji. Dane te mogą być także integrowane z systemami GIS do późniejszych analiz przestrzennych. Na pokładzie znajduje się czujnik do pomiaru tekstury sprzężony z akcelerometrem umożliwiającym korekcję wstrząsów występujących podczas jazdy. MUP wyposażono w kamery i rejestratory obrazu. Zainstalowana kamera o rozdzielczości 1920 × 1200 px pozwala z dużą dokładnością przedstawić zarówno drogę, jak i jej otoczenie. Wszystkie systemy współpracują z jednostką centralną Road Surface Profiler – MK IV i specjalnie do tego przeznaczonym tabletem.
Aplikacje i zastosowanie:
- analiza stanu infrastruktury: pozyskane dane są używane przez służby miejskie, zarządy dróg lub inne instytucje odpowiedzialne za zarządzanie infrastrukturą rowerową w celu oceny jej stanu i planowania napraw;
- planowanie rozbudowy: dane pomiarowe mogą służyć do planowania nowych ścieżek rowerowych lub poprawy istniejących, w tym dostosowania infrastruktury do potrzeb rowerzystów;
- monitorowanie bezpieczeństwa: dzięki ocenie jakości nawierzchni i profilowi terenu możliwe jest zidentyfikowanie potencjalnie niebezpiecznych odcinków ścieżek rowerowych.
Mobilne urządzenie pomiarowe MUP jest nieocenionym narzędziem w procesie dbania o infrastrukturę rowerową, podnoszenia komfortu i bezpieczeństwa jazdy oraz tworzenia zrównoważonej i nowoczesnej sieci miejskich i zamiejskich tras rowerowych.




fot. 1. Mobilne urządzenie pomiarowe MUP
Zakład Diagnostyki Nawierzchni w praktyce
Kontakt
Kierownik Zakładu

mgr inż. Tomasz Mechowski
Zastępca Kierownika Zakładu
dr hab. inż. Mirosław Graczyk, prof. IBDiM
Pracownicy
mgr inż. Jacek Sudyka
Radosław Borucki
Eugeniusz Majewski
mgr inż. Przemysław Harasim
mgr Anna Łukasiewicz
Zbigniew Sudyka
Zakład Diagnostyki Nawierzchni - Typy badań
badanie betonu warszawa
badanie betonu
badanie betonu na ściskanie
badanie wytrzymałościowe betonu
badanie ścieralności betonu
badanie BCA betonu
badanie sprężystości betonu
badanie zwieńczeń studni
badanie prefabrykatów drogowych
badanie kostki brukowej
badanie krawężników
badanie płyt chodnikowych
badanie betonu warszawa
badanie betonu
badanie betonu na ściskanie
badanie wytrzymałościowe betonu
badanie ścieralności betonu
badanie BCA betonu
badanie sprężystości betonu
badanie zwieńczeń studni
badanie prefabrykatów drogowych
badanie kostki brukowej
badanie krawężników
badanie płyt chodnikowych
badanie betonu warszawa
badanie betonu
badanie betonu na ściskanie
badanie wytrzymałościowe betonu
badanie ścieralności betonu
badanie BCA betonu
badanie sprężystości betonu
badanie zwieńczeń studni
badanie prefabrykatów drogowych
badanie kostki brukowej
badanie krawężników
badanie płyt chodnikowych